
Archive
Balancing Quadruped
I am expanding the work done by previous Master’s Student Ben Shuch in the field of Quadrupedal Robotic Locomotion. I am utilizing force sensing to calculate the center of balance of a quadrupedal laminate robot with the end goal of implementing a controls system capable of adapting in real time to changing ground angles. Each of the robot’s four legs have two degrees of freedom and are controlled by a four-bar system powered by two servo motors. While standing in place, the robot will behave like a parallel manipulator; when standing on an angled table, it will use the difference between the current force distribution and an ideal force distribution for balance to direct a change in leg length to counteract the angled ground. The laminate materials used to construct the robot make it a more cost effective research platform for researching controls problems.
This project was funded as part of a Barrett Honors thesis.
Students: Dante Roush
quadruped
Bio-inspired bipedal robot design
My research draws inspiration from terrestrial avians in terms of development of an optimized leg design for bipedal walking, running and jumping. I will be applying the skills I have learned during the foldable robotics class in the estimation of kinematics, design and fabrication of the robotic leg using software such as Python and SolidWorks. To gauge the dynamics of the leg for different functions I will be using Unity Simulation Engine and Visual Studio to validate the results of experimental testing and biomechanics research. My team has already created a model for the leg which we will begin to conduct experiments on. I have used Unity to help test motor parameters in order to select a motor with the best combination of gear ratios, masses and torques for our leg design.
This project was part of a Masters' project.
Students: Sudhanshu Katarey
biped
Buoyancy Control of a Bio-inspired Robotic Fish
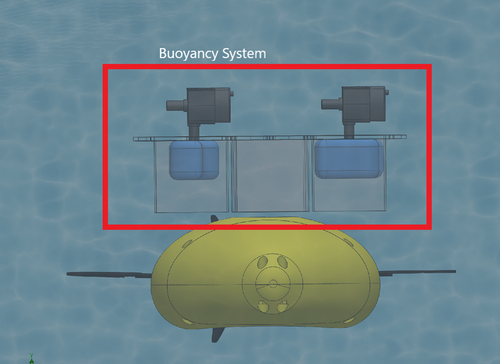
This project focuses on controlling the altitude of an underwater robot meant to do environmental cleanup of vegetation in a canal. A bladder modeled off fish anatomy will be designed containing two bulbs, likely of laminate material, with a tube containing a pump. The pump will transfer air between the two bulbs to control the direction of the buoyancy in the robot. The shift in buoyancy will allow the body of the robot to move either up or down. Using this laminate material in prototyping for underwater robotics allows for low cost testing and quick turnaround time for iterations. We will be checking consistency of the level that the robot is driving using an IMU to control the amount of water or air in the bulbs of the systems.
Funding for this project was provided by FURI.
Students: Alia Gilbert
archived
Canal Maintenance and Cleaning via Autonomous Fish-Inspired Robots

In this project, the goal is to build an AUV that explores the water canals and performs cleaning of these canals as necessary. We have selected the fin propulsion mechanism as the propulsion system for our AUV. Essentially, we are designing and building an underwater robot that will use a fin to move inside water. Our capability of using a laminated robot, will give us more advantage in easily gain the required stiffness in the tail in order to overcome the water drag.
Funding for this project was provided in part by SRP.
Students: Mohammad Sharifzadeh, Yuhao Jiang
fish
Children’s Engineering Kit

The purpose of this project is to create a kit that aims to spark an interest in engineering for preadolescents and investigate what are effective methods of doing so. The highlight of this project is the implementation of Choice Theory, which proposes that student engagement increases when they are presented with a series of options to choose from. The kit will consist of lessons that diverge in different directions on multiple steps to represent the diversity of engineering solutions. In the end, these branched out paths will merge together to a single product to show students the interconnectedness of different engineering disciplines. The students’ interaction and completion of the kit will be analyzed to determine what level of complexity and guidance is best suited for preadolescents.
This project was funded as part of a Barrett Honors thesis.
Students: Hebellyn Quezada
misc
Control of a biped laminate robot
Currently, a lot of focus previously for laminate robots has been on design, but more complex applications require higher level design. The aim of my project is to demonstrate that laminate robots can be utilized for higher level design by designing a laminate biped with model-based controls that can balance while standing and walking. This project starts from the early prototyping design stage. Designs are created using python and Solidworks; PopupCAD is used to produce the DXF files needed for high speed laminate manufacturing. Through testing various design iterations, a design was reached with the ability to stand. The motors of this design were then modified to meet desired torque parameters. Testing has shown high torque is necessary to utilize robust control techniques, which will be used to balance the biped while it both stands and walks. Through python-based physics simulations utilizing Kane’s method, a model of the bipedal design can be created and linearized for controls applications. Since the system is fully controllable, LQR control techniques will be applied for balancing while standing and walking. Eventually, different control systems can be design and implemented for various system applications.
This project is part of an ongoing Masters' thesis.
Students: Taha Shafa
biped
Design of a Cutting Tool for Clearing Underwater Vegetation
The objective of this research is to further the development of the bio-inspired fish being and constructed by Dr. Aukes and his team of student researchers by designing an inexpensive, reliable, and effective cutting tool to be used in conjunction with the robotic fish to cut and reduce the number of underwater vegetation growing in canals and waterways here in Phoenix. Such a device would reduce the cost and manpower currently used to clear those canals. Without clearing aquatic plants from the canals, certain parts of the city would also become vulnerable to increased flooding in the event of a sudden downpour, leading to possible infrastructure damage.
Funding for this project was provided by FURI.
Students: Sheena Benson
archived
Design of a Hopping Platform using Laminate Construction
Taking advantage of laminate materials’ flexibility, a high-performance jumping platform is developed. A physical prototype and accurate model of the design are sought in tandem with each being used to inform the other. This will result in a leg design to be incorporated into future jumping or hopping robots and a validated simulation that can be used to design future robots using the same methods.
Funding for this project was provided by FURI and KEEN.
Students: Jacob Knaup
archived
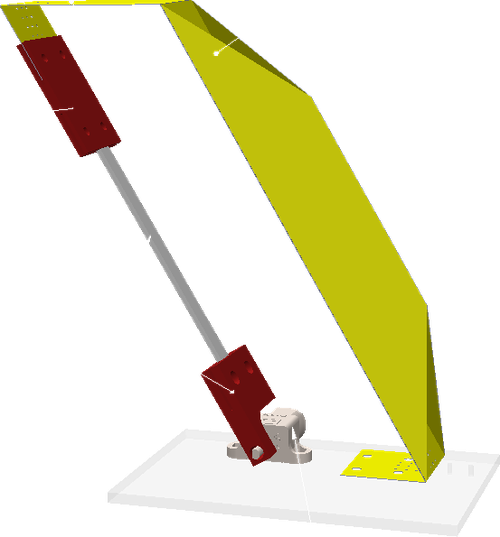
Design, Implementation, and Testing of a Force-Sensing Quadrupedal Laminate Robot

In this project we present a low-cost force-sensing quadrupedal laminate robot platform. The robot has two degrees of freedom on each of four independent legs, allowing for a variety of motion trajectories to be created at each leg, thus creating a rich control space to explore on a relatively low-cost robot. This platform will allow a user to research complex motion and gait analysis control questions, and use different concepts in computer science and control theory methods to permit it to walk. The motion trajectory of each leg has been modeled in Python. Critical design considerations are the complexity of the laminate design, the rigidity of the materials of which the laminate is constructed, the accuracy of the transmission to control each leg, and the design of the force sensing legs.
This project was the result of coursework and a Masters thesis.
Students: Ben Shuch
archived
Development and Validation of a Custom Soft-Body FEA Simulator for Rapid Prototyping
Descriprion
How reliable are the forces generated by a simulation of a soft hydrogel robot when compared to a real-life counterpart
Hydrogels are water-swollen three-dimensional polymeric networks that respond to specific stimuli, such as electrical signals, magnetic fields, mechanical stress, light, or temperature1. These stimuli cause a controllable change in the shape or volume of the hydrogel, physically altering the molecular interactions in the material. Voxels represent a value on a regular grid in three-dimensional space. Similarly to a pixel with an added dimension, and just like pixels, voxels can be used to make shapes and structures. Voxels allow the user to create discrete packages of material that perform predictably and are easy to use. Hydrogel can technically be cast into many shapes and sizes, but using uniform cubes simplifies changes in the design, especially when many iterations are expected.
Funding for this project was provided by FURI.
Development of an Multi-Process Planning Tool
This project seeks to provide methods and set of tools for processing, modifying, and generating 3D models that use multiple materials and fabrication processes. Areas of research include planning of fabrication steps, automatic part modification, optimization of component properties, and generation of the files and fixtures needed to produce multi-material parts. Implementation of these algorithms is done in Python using a voxel-based model representation. This work will make multi-material fabrication more accessible for educational and research robotics. Current work is focused on applications of graded materials in the design of robust material transitions. The results will inform the design of stronger flexible joints for use in low-cost robotics applications. More information is available on the project GitHub repository.
Extending the Jumping Range of a Small Robot via Collapsible Gliding Wings

This project investigates the impact curvature, buckling, and anisotropy play when used passively to enhance jumping capability. In this project we employ a curved structure to allow a rigid link to collapse preferentially in one direction when it encounters aerodynamic drag forces. A model was constructed in Python using the data gathered through the experiments and was tuned so that its outputs were as close as possible to the experimental results. As expected, increasing the wing diameter increased the total fall time, and increasing the payload mass decreased the total fall time. Orientation of the wings around the vertical axis of the glider relative to the direction of horizontal motion was also found to have an effect on the length of time between when the gliding platform was launched and when it made contact with the ground, with a configuration where the axis between the wings was parallel to the direction of motion granting added stability.
This project was funded as part of a Barrett Honors thesis.
Students: Guston Lighthouse
archived
Foldable Robotic Elephant Trunk
Standard robotic arms are limited by their cost, size, and lack of flexibility. These factors make standard robotic arms difficult to apply in complex scenarios. While traditional, rigid robotic arms are used in factories and plants, they require meticulous planning, spacious locations, heavy funding, and can only be used for limited purposes, as they are inherently unsafe around humans. Laminate devices, on the other hand, are far more compact, flexible, cheap, and modular, as they use flat, somewhat flexible materials which fold up like a popup-book to create complex nonlinear motion. With these advantages in mind, I propose to research continuum robot arms made using foldable, laminate techniques, using an elephant trunk as a source of inspiration. The elephant trunk has more degrees of freedom than the standard robotic arm, which allows it to perform complex manipulation tasks in unstructured natural environments. This concept, when applied to a robotic arm, would allow it to be used in many more applications, and could be designed to accomplish a variety of tasks ill-suited to typical robot arms. Furthermore, the system could be designed to be collapsible, which would make it modular, portable, and easily deployable, increasing its applications further.
Funding for this project was provided by FURI and KEEN.
Students: Mannat Rana
archived
Low-Cost, Modular Force Control Solution
Force control offers numerous benefits to robots over other control schemes such as more natural movements and increased sensitivity to the surrounding environment, but it is typically only available to high-end robots. This research aims to develop a modular force control solution for low-cost robots. The solution is designed to be easy to incorporate into future laminate robots, allowing the designer to add force control capabilities, while placing minimal constraints on the design.
Funding for this project was provided by FURI.
Students: Jacob Knaup
Modular Tail for Stabilizing Robot Platforms
Based on the idea that robots can be made to display many features of animals such as locomotion, the goal of this thesis is to recreate a tail based on the mechanics of a cheetah since the use of its tail is the most effective in dynamic stability and test its effectiveness on an inherently unstable object such as an rc car. The question focuses on which tail design is necessary to fix an inherently unstable object. This topic is derived from how a cheetah uses its tail to stabilize itself while catching prey. The question of developing a design will be answered by creating a unity model inspired by a cheetah’s tail and simulate how it will stabilize an object that lacks balance. The selected platform is an rc car. The model is already developed in unity, but its movement is not unstable. After making the inherently unstable by adjusting the scaling of the object to make it taller, the motor speed, turning angle, mass of the cube, mass of the wheels, and radius of the wheels, a motor and tail will be added for balance. The selected rc car will be adjusted to match the parameters in unity. The expected result of this procedure is to have a display of a real life model matching the simulation.
This project was funded as part of a Barrett Honors thesis.
Students: Frank Ononye
quadruped
Signals in the Soil
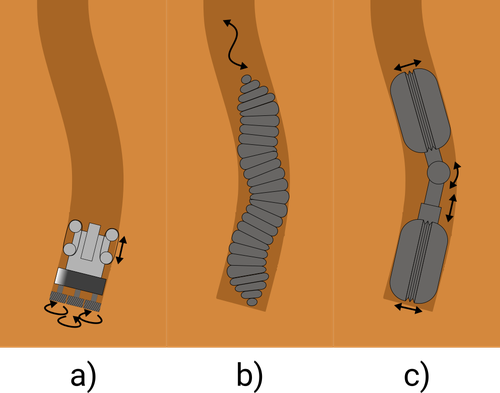
What’s inside the ground leaves us a mystery, and we are trying to use the self-boring robot nodes to collect signals underground. Currently, we are focusing on the soft material-granular media contacting behavior, adding material compliance into granular media RFT model. With a sand-burrowing robot platform built, we are validating the model, adding sensors, and implementing control. As a final goal, a series of self-burrowing digging robots will be created, enabling us to sense underground environments with minimal human intervention.
This work was supported by NSF Award #1841574
Students: Shawn (Dongting) Li
misc
Testing Method of Stiffening Actuators

Objective & Research Question
The goal of this project is to design a platform that can evaluate the performance of wearable robotic prototypes designed to stiffen on command for the purpose support and stabilization.
Background:
- Millions of elderly adults around the world experience loss of stability which can lead to falls and injury
- A wearable hybrid robotic system has been proposed to assist and support elderly users via a variety of potential prototyped solutions
- Being able to model the dynamic performance is essential to understanding these protypes
- The purpose of this test platform is to provide a generic interface to understand more about these designs
Methods:
- Based off data collected from motion capture
- Torque = 80.0 Nm
- Angular Velocity = 2.75 rad/s
- Power = 150 W
- Test actuators need to be able to achieve similar performance
- Design parameters that are available to change include motor selection, gear selection and lever arm lengths.
Results
- A rotary based test bench is proposed due to its decreased friction with in the system as well as its adaptability for future testing of multiple actuators with multiple degrees of freedom
- CIM was selected for the use of test bench with 70:1 gear reduction
- Future work will include obtaining and integrating components and developing a test protocol to implementation into Python
Funding for this project was provided through FURI.
Students: Anson Kwan
Underactuated Laminate gripper with Low-Cost Sensing.

This project explores the design and development of a robotic gripper using low cost materials. It uses a four-bar mechanism to grasp objects. The system is back driven until the finger makes contact with an object. The servo continues to drive over coming the force of a spring holding the gripper in a open position providing the method of under-actuation. The laminate design allows for multiple materials to be used. This can be exploited to make the contact points more flexible for the inclusion of flex sensors. By using multiple low cost flex sensors the location, number, and amount of force being applied in the grip can be determined using beam theory as a model.
Funding for this project was provided by FURI.
Students: Drew Carlson
Wing Design
The projects involve design of wings for a laminate biped robot for providing locomotion stabilization. The wings are designed to provide stabilization for different gait such as running, hopping and jumping. The project aims to develop a reliable dynamics model which includes biped dynamics as well as aerodynamics for creating and testing multiple designs optimized for various gaits. The aerodynamic simulations are run on a vortex-lattice code \u201CVORLAX\u201D, which provides numeric simulation of the defined geometric bodies. The simulations are then to be plugged into the robot dynamics model, which is to be utilized for robot design iterations, simulations and design of a controller. "
This project is part of an ongoing Masters' thesis.
Students: Vipul Gadekar
biped
Older projects that are currently inactive.